Gründe eins bis fünf: Einfache, schnelle und reproduzierbare Ausrichtung
LMK Position – Robotergestütztes Leuchtdichtekamera-System
Leuchtdichtekamera mit 6-Achs-Robotik – für automatisierte, präzise Display-Messtechnik und Automotive-Anwendungen
Ausrichtung und Messung mit 6-Achs-Roboter

LMK Position ist ein robotergestütztes Messsystem, das eine hochauflösende LMK-Leuchtdichtekamera mit einem 6-achsigen Industrieroboter kombiniert. Es bietet automatisierte, präzise und reproduzierbare Messungen für alle Arten von Displays und ist besonders für Automotive-Anwendungen geeignet.
Das System vereinfacht und beschleunigt den kompletten Messprozess:
- Automatisierte Ausrichtung: Zeitsparend, fehlerarm, reproduzierbar.
- Flexible Messung: Nach internationalen Spezifikationen und Normen (z. B. DFF, ICDM) (externe links) und mit verschiedenen Messgeräten kombinierbar.
Dank intelligenter Bildverarbeitung und bewährter Kalibrierungstechnologien ist LMK Position die ideale Lösung für Forschung, Entwicklung und Kleinserienproduktion.
10 gute Gründe für LMK Position
- Schnelle Senkrechtausrichtung: Automatisierte DFF-BlackMURA-Ausrichtung in wenigen Sekunden
- Präzise Messung unter Winkel: Goniometrische Messungen vollständig automatisiert und hochgenau.
- Exakte Konoskopie: Automatische Ausrichtung von Konoskopen an jedem Freiform-Display mittels 3D-Scan.
- Voller Bewegungsbereich: 6-Achs-Bewegung dank sicherer Kabelführung ohne Einschränkung.
- Intelligentes Stativ: Mehrere speicherbare Kamera-Positionen für konsistente Reproduzierbarkeit.

- Spielend leichte Handhabung: Verzicht auf aufwendige, einmalige Befestigungen – ideal für Prototypen.
- Mehr Details durch Bildfusion: Höhere Auflösung mittels automatisiertem Image Stitching
- Intelligente Funktionen: Automatischer Fokus, Defokus, Sparkle-Scan und virtuelle Bildabstandsmessung – auch mit manuellen oder Fixfokus-Objektiven.
- Multisystem-Kompatibilität: Alle Ausrichtungsfunktionen auch mit Spektroradiometer specbos 1211 & specbos 2501 nutzbar.
- Modular und flexibel: Leuchtdichtekamera, Spektroradiometer und Roboter sind auch einzeln einsetzbar – bei temporärem Systemabbau.
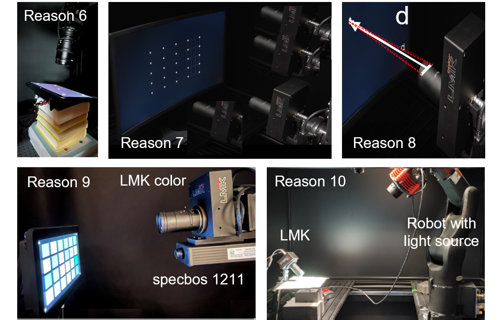
Gründe sechs bis zehn: Kosteneffiziente und zukunftssichere Lösungen für die Messtechnik
Lade Player...
JETZT MEHR INFOS ANFRAGEN UND DEMO-TERMIN VEREINBAREN!
Integration & Sicherheit
TechnoTeam bietet die komplette Integration vor Ort in der EU, Südkorea und China. Dabei werden alle relevanten Sicherheitsstandards erfüllt. Dokumente zur Einrichtung sowie wissenschaftliche Publikationen sind hier verfügbar.

Beispiel einer üblichen Integration eines LMK Position Systems
| Technische Daten | |
|---|---|
| Maximale Armreichweite | 875 mm |
| Anzahl der Achsen | 6 |
| Positionserkennung und Motoren | Absoluter Encoder; AC-Servomotoren und Bremsen für alle Achsen |
| Bewegungsbereich | J1: +/-170°; J2: +135° -100°; J3: +153° -136°; J4: +/-270°; J5: +/- 120°; J6: +/-360° |
| Wiederholgenauigkeit der Position (in der Mitte der Kamerahalterung) | +/-0.03 mm |
| Gewicht mit Alu-Profilgestell (inkl. Roboter, LMK, Steuerung, Kabel) | < 150 kg |
| Abmessungen Alu-Profilgestell (LxBxH) | 780 × 780 × 950 mm (Installationshöhe des Roboters: 970 mm) |
| Kompatible Kameras | LMK 5, LMK 6-5, LMK 6-12, LMK 6-30 |
| Installationsumgebung des Roboters | Temperatur: 0 bis 40°C; Luftfeuchtigkeit: 20 bis 90% RH; Vibration:4,9 m/s² (0,5 G) |
| Optionale Ausstattung | 7. Achse (linear) montiert direkt unter dem Roboter (unter J1) Specbos 1211-LAN VIS-NIR Spektroradiometer, Industrie-PC (19'' Rack) |
RELEVANTE PRODUKTE UND APPLIKATIONEN





Publikationen
Advanced Alignment and Metrology Concepts Using Photometric Robotics with Examples for Automotive Displays
International Conference on Display Technology (ICDT 2021)
The alignment quality and reproducibility in ILMD (Imaging Luminance Measurement Device) based display metrology has a great influence on the reproducibility of the obtained measurement data. In this context, this contribution outlines and introduces several advanced measurement and alignment concepts that can be performed with “photometric robotics”. The term describes machine vision performed with an ILMD supported by robotic movements.
Precise Virtual Image Distance Measurements Using Imaging Luminance Measurement Devices with Type II Calibration
SID Vehicle Displays & Interfaces 2022
As head-up displays play an increasingly important role in modern vehicle cockpits, there is a growing demand for measurement procedures to characterize them. There are two general approaches to measuring virtual image distance, a parallax-based triangulation method and a focus-based technique. They can be performed using Imaging Luminance Measurement Devices with type II calibration, making them suitable for photometrical and geometrical measurements. This paper examines the advantages and drawbacks of both methods using mathematical models and measurement data.
Distinguished Paper: Short Distance Uniformity and BlackMURA Measurements
Society for Information Display
The increasing display sizes and changing form factors of displays, including automotive displays, lead to impractical measurement distances for spatial uniformity measurements. This contribution suggests and exemplarily applies two alternative and combinable methods to allow spatial uniformity measurements at low distances and describes an adjusted BlackMURA complaint validation procedure. The proposed methods are validated with a high-quality display device and are compared to results using the standard long-distance measurement procedure.
Photometric Robotics for Fast and Precise Human-Centered Automotive Display Metrology
SID Vehicle Displays & Interfaces 2021
The increasing complexity of automotive displays in terms of design, shape, and degree of integration leads to an increasing complexity of setup and alignment procedures. In this context, the effort required to ensure reproducible measurement results, e.g. for prototypes or in research and development is also increasing rapidly. We introduce the concept of photometric robotics which combines machine vision, photometry, and robotic to solve these challenges.
- Typ:
- Paket
- Anwendungen:
- Automotive Display
- Messgröße:
- Farbmessung Lichtmessung
- Aufgaben:
- Automation & Industrie Entwicklung & Industrie Wissenschaft & Forschung