Gründe eins bis fünf: Einfache, schnelle und reproduzierbare Ausrichtung
LMK Position: Robotergestütztes Display-Messsystem
Ausrichtung und Messung mit 6-Achs-Roboter

LMK Position ist ein robotergestütztes Messsystem, das eine hochauflösende LMK-Leuchtdichtekamera mit einem 6-achsigen Industrieroboter kombiniert. Es bietet automatisierte, präzise und reproduzierbare Messungen für alle Arten von Displays und ist besonders für Automotive-Anwendungen geeignet.
Das System vereinfacht und beschleunigt den kompletten Messprozess:
- Automatisierte Ausrichtung — Zeitsparend, fehlerarm, reproduzierbar.
- Flexible Messung — Nach internationalen Spezifikationen und Normen (z. B. DFF, ICDM) und mit verschiedenen Messgeräten kombinierbar.
Dank intelligenter Bildverarbeitung und bewährter Kalibrierungstechnologien ist LMK Position die ideale Lösung für Forschung, Entwicklung und Kleinserienproduktion.
10 gute Gründe für LMK Position
- Schnelle Senkrechtausrichtung: Automatisierte DFF-BlackMURA-Ausrichtung in wenigen Sekunden
- Präzise Messung unter Winkel: Goniometrische Messungen vollständig automatisiert und hochgenau.
- Exakte Konoskopie: Automatische Ausrichtung von Konoskopen an jedem Curved- und Freiform-Display mittels 3D-Scan sowie Pixelstruktur-Vermeidung.
- Voller Bewegungsbereich: 6-Achs-Bewegung dank sicherer Kabelführung ohne Einschränkung.
- Intelligentes Stativ: Mehrere speicherbare Kamera-Positionen für konsistente Reproduzierbarkeit.

- Spielend leichte Handhabung: Verzicht auf aufwendige, einmalige Befestigungen – ideal für Prototypen.
- Mehr Details durch Bildfusion: Höhere Auflösung mittels automatisiertem Image Stitching – abhängig vom Objektiv.
- Intelligente Funktionen: Automatischer Fokus, Defokus, Sparkle-Scan und virtuelle Bildabstandsmessung – auch mit manuellen oder Fixfokus-Objektiven.
- Multisystem-Kompatibilität: Alle Ausrichtungsfunktionen auch mit Spektroradiometer specbos 1211 oder specbos 2501 nutzbar.
- Modular und flexibel: Leuchtdichtekamera, Spektroradiometer und Roboter sind auch einzeln einsetzbar – bei temporärem Systemabbau.
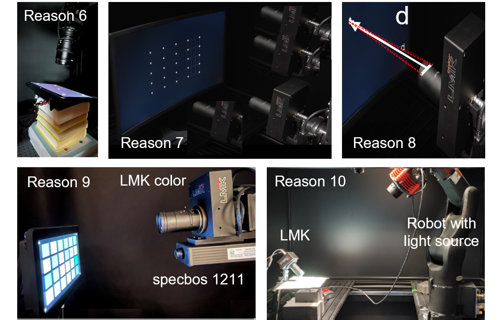
Gründe sechs bis zehn: Kosteneffiziente und zukunftssichere Lösungen für die Messtechnik
Request more information now and arrange a demonstration
Lade Player...
Integration & Sicherheit
TechnoTeam bietet die komplette Integration vor Ort in der EU, Südkorea und China. Dabei werden alle relevanten Sicherheitsstandards erfüllt. Dokumente zur Einrichtung sowie wissenschaftliche Publikationen sind hier verfügbar.

Beispiel einer üblichen Integration eines LMK Position Systems
| Technische Daten | |
|---|---|
| Maximale Armreichweite | 875 mm |
| Anzahl der Achsen | 6 |
| Encoder und Motoren | Absoluter Encoder; AC-Servomotoren und Bremsen für alle Achsen |
| Bewegungsbereich | J1: ±170°; J2: +135° -100°; J3: +153° -136°; J4: ±270°; J5: ±120°; J6: ±360° |
| Wiederholgenauigkeit der Position (in der Mitte der Kamerahalterung) | ±0,03 mm |
| Gewicht mit Alu-Profilgestell (inkl. Roboter, LMK, Steuerung, Kabel) | < 150 kg |
| Abmessungen Alu-Profilgestell (LxBxH) | 780 × 780 × 950 mm (Installationshöhe des Roboters: 970 mm) |
| Kompatible Kameras | LMK 6-5, LMK 6-12, LMK 6-30 |
| Installationsumgebung des Roboters | Temperatur: 0 bis 40°C; Luftfeuchtigkeit: 20 bis 90% RH; Vibration: 4,9 m/s² (0,5 G) |
| Optionale Ausstattung |
|
FAQ — LMK Position
Warum eine ILMD mit einem 6-Achs-Roboter kombinieren — was ersetzt das?
Klassische ILMD-basierte Display-Messaufbauten arbeiten mit manuellen Justagehalterungen (Schablonen, Halterungen, Befestigungen) und mit kundenspezifischen oder speziell gefertigten Mehrachs-Goniophotometer-Mechaniken, um die Kamera relativ zum DUT zu positionieren. Für jeden neuen Prototyp oder jede neue Messgeometrie muss die Halterung neu aufgebaut oder nachjustiert werden — zeitaufwendig, fehleranfällig und für Freiform- oder Pillar-to-Pillar-Displays kaum praktikabel.
Photometric Robotics ersetzt beides: Die 6-Achs-Kinematik liefert die Winkelfreiheit eines Goniometers und zugleich die translatorische Freiheit eines XYZ-Tisches. Jede Messposition wird entweder über bildbasierte Ausrichtung angefahren — das Live-Bild der ILMD führt den Roboter in die korrekte Pose (BlackMURA-Muster, Konoskop-Ausrichtung, Sparkle-Scan usw.) — oder über das deterministische Wiederanfahren einer gespeicherten Pose. Beide Modi sind reproduzierbar unabhängig vom Bediener und machen einmalige mechanische Sondervorrichtungen überflüssig.
Was bedeutet ±0,03 mm Wiederholgenauigkeit in der Praxis?
Die Angabe ±0,03 mm bezieht sich auf die mechanische Positionswiederholgenauigkeit an der Kameraaufnahme — also darauf, wie präzise der reine Roboter eine gespeicherte Position wieder anfährt. Für die tägliche Displaymesstechnik bedeutet das zweierlei:
- Konsistenz von Messlauf zu Messlauf: Wenn dieselbe Kamerapose wieder aufgerufen wird (z. B. für BlackMURA-Messungen an einer Display-Serie), erreicht die Kamera jedes Mal nahezu dieselbe Position. Damit entfällt eine wesentliche Quelle bedienerabhängiger Streuung, wie sie bei variablen Aufbauten mit festen Justagevorrichtungen typisch ist.
- Effektive Ausrichtungsqualität am DUT: Die finale Ausrichtung wird nicht allein vom Roboter bestimmt — sie wird von der bildbasierten Feinausrichtung der LMK dominiert (BlackMURA-Muster, Konoskop-Ausrichtung, APR usw.). Der Roboter liefert eine mechanisch ausreichend stabile Pose, damit die optische Feinausrichtung schnell und zuverlässig konvergiert — bei jedem DUT, in jeder Anordnung.
Welche Kameras und Messgeräte lassen sich auf LMK Position montieren?
Kompatible LMK-Kameras: LMK 6-5, LMK 6-12 und LMK 6-30 (die aktuelle LMK-6-Linie). Zusätzlich können alle Ausrichtungsfunktionen auch mit den Spektroradiometern specbos 1211 oder specbos 2501 LAN genutzt werden. Bei LMK Position erfolgt die Ausrichtung über Photometric Robotics mit der LMK (oder über einen Teach-in-Schritt); das Spektroradiometer übernimmt die resultierende Pose anschließend für die spektrale Messung. Kamera, Spektrometer und Roboter lassen sich darüber hinaus für Einzelaufgaben temporär entkoppeln.
Was bedeutet „automatisierte DFF-BlackMURA-Ausrichtung" — und welche weiteren Ausrichtungsschritte beschleunigt sie?
BlackMURA — der De-facto-Standard für niederfrequente Uniformitätsmessungen an Automotive-Displays — fordert eine präzise senkrechte (On-Axis-)Ausrichtung der Kamera zum DUT.
LMK Position automatisiert diese Ausrichtung innerhalb weniger Sekunden, indem das Live-Leuchtdichtebild den Roboter in die BlackMURA-konforme Pose führt. Ebenso automatisiert wird der BlackMURA-Feldwinkel-Test, mit dem geprüft wird, ob der gewählte Messabstand für die aktuelle Kamera-Objektiv-DUT-Kombination zulässig ist — eine Prüfung, die im Tagesgeschäft sonst gern unter Zeitdruck übersprungen wird und die direkt auf die Gültigkeit jeder nachfolgenden BlackMURA-Messung wirkt.
Wie unterstützt LMK Position konoskopische Messungen an Curved-Displays?
Konoskopische Messungen (winkelabhängige Leuchtdichte, Farbe, Kontrast) erfordern, dass die optische Achse des Konoskop-Objektivs senkrecht zur lokalen Oberfläche des DUT steht. Bei einem flachen Panel ist das einfach; bei einem Curved-Display ändert sich die lokale Flächennormale jedoch über die Displayfläche hinweg, sodass jede Messposition eine eigene Ausrichtung benötigt.
Genau hier zeigt LMK Position seine Stärke: Das System führt einen 3D-Scan der DUT-Oberfläche durch und positioniert das Konoskop automatisch in die korrekte lokale Pose für jeden Messpunkt — einschließlich Pixelstruktur-Vermeidung, damit die kleine Konoskop-Apertur nicht auf einem Subpixel-Spalt landet. Damit wird eine mehrpunktige Winkelcharakterisierung über ein Curved-Display praktikabel, die ansonsten für jeden einzelnen Punkt einen manuellen Neujustagezyklus erfordern würde.
Welche weiteren Messaufgaben automatisiert LMK Position?
Über BlackMURA und Konoskopmessungen hinaus automatisiert die Roboterplattform die ausrichtungskritischen Schritte mehrerer Display-Messungen:
- Goniometrische Messungen mit der bildgebenden Leuchtdichtekamera — „Vantage Points": Der Roboter führt die LMK durch beliebig vordefinierte Blickrichtungen (z. B. Fahrer, Beifahrer, Fondpassagier) und erfasst an jeder Position winkelaufgelöste Leuchtdichte- und Farbdaten. Dieselben Trajektorien können optional mit dem auf dem Roboter montierten specbos-Spektroradiometer abgefahren werden — für spektral aufgelöste Daten an exakt denselben Positionen.
- Image Stitching für ultraweite bzw. Pillar-to-Pillar-Displays (21:9, 32:9, 6:1 etc.): Mehrere Aufnahmen werden über die Advanced Pixel Registration (APR)-Methode zu einem nahtlosen, hochauflösenden Leuchtdichtebild verbunden.
- Display-Sparkle- / Anti-Glare-Bewertung: Der automatische Distanz-Fokus-Scan ermittelt die Position der maximalen Sparkle-Sichtbarkeit — unsere Grundlage für reproduzierbare Sparkle-Messungen nach IEC 62977-3-9.
- Auto-Focus / Defocus und DFF-konformes reproduzierbares Defokussieren — auch mit manuellen oder Fix-Fokus-Objektiven nutzbar.
LMK Position kann darüber hinaus für Messungen der virtuellen Bildentfernung (Virtual Image Distance, VID) per Parallaxe eingesetzt werden — der Roboter verschiebt die LMK präzise zwischen zwei definierten Positionen, und der scheinbare Bildversatz wird trianguliert, um die VID abzuleiten.
Was bedeutet „Photometric Robotics" — ist das ein TechnoTeam-Begriff?
Photometric Robotics bezeichnet das Zusammenführen von Bildverarbeitung, Photometrie und Industrierobotik in einer Plattform: Eine bildgebende Leuchtdichtemesskamera (ILMD) steuert den Roboter über das Live-Bild, der Roboter positioniert die ILMD (oder ein Spektroradiometer / Konoskop), und das Messergebnis wird geometrisch im DUT-Koordinatensystem referenziert. Der Begriff wurde von TechnoTeam ab 2021 in einer Reihe von Konferenz- und peer-reviewten Veröffentlichungen geprägt und weiterentwickelt — LMK Position ist die kommerzielle Umsetzung.
Wie genau ist LMK Position als photometrisches Goniometer?
Veröffentlichte Werte aus dem Fachbeitrag "Goniometric Measurements Using Photometric Robots With Imaging Luminance Measurement Devices (ILMDs)" für eine LMK 6-30 (100-mm-Objektiv) auf dem LMK-Position-Roboter:
- Posenwiederholgenauigkeit des Roboters (nach ca. 90 min Aufwärmphase): maximaler Restpositionsfehler ≈ 0,01°.
- Goniometrische Scan-Genauigkeit (250 mm Scan-Distanz, 0° ≤ ϑ ≤ 60°, voller 360°-Azimut): typisch 0,1°–0,2°, maximal 0,28° bei ϑ = 60°.
- Positionsunabhängigkeit: kein messbarer Trend über fünf DUT-Positionen innerhalb einer 300-mm-Goniobox — kein „Sweet-Spot"-Tuning der DUT-Position erforderlich.
- Objektivwechsel: keine Änderung innerhalb der Messunsicherheit.
Eine optionale absolute Roboterkalibrierung reduziert den maximalen Winkelfehler auf 0,04°–0,15° (Mittel ≈ 0,05°), erfordert jedoch spezielle Werkzeuge und nach jeder Wartung eine Re-Kalibrierung — empfohlen daher nur, wenn die Anwendung diese absolute Genauigkeit wirklich benötigt. Für die meisten Aufgaben der Displaymesstechnik ist die Standardkonfiguration ausreichend.
Welche Normen, OEM-Spezifikationen und internationalen Vorgaben unterstützt LMK Position?
LMK Position ist darauf ausgelegt, Ausrichtung und Messung gemäß den einschlägigen Display-Mess-Spezifikationen durchzuführen, insbesondere:
- DFF-Spezifikationen (Deutsches Flachdisplay Forum) — darunter DFF BlackMURA, DFF Gamma, DFF Sticking Image, DFF OLED.
- ICDM / IDMS 1.3 Kapitel 3.8 (Information Display Measurements Standard, SID / ICDM).
- IEC 62977 Familie — z. B. IEC 62977-3-9 (Sparkle)
Als Plattform setzt LMK Position auf der Normkonformität der LMK-Kamera und des jeweiligen Add-ons auf (BlackMURA, Konoskop, Reflexion, Sparkle, Sticking Image) — und ergänzt diese um die Ausrichtungsautomatisierung, die solche Messungen auf modernen, komplexen Displayformen reproduzierbar und praktikabel macht.
Wie schneidet LMK Position im Vergleich zu einem klassischen Goniometer ab?
Beide Systemtypen haben ihre Berechtigung — die richtige Wahl hängt vom benötigten Winkelbereich, der DUT-Geometrie und dem gewünschten Automatisierungsgrad ab.
Klassische Goniophotometer decken einen größeren Winkelbereich ab (in manchen Konfigurationen bis zu ±180°) und bleiben die Referenzwahl, wenn sehr weite Messwinkel oder höchste Absolutpräzision gefordert sind. Genauigkeit, Aufbauzeit und DUT-Handling streuen dabei spürbar nach Modell und Preisklasse.
LMK Position erreicht Inklinationswinkel bis 60°–75° bei vollem 360°-Azimut — das deckt die praktisch relevanten Sichtbereiche sowohl für Automotive- als auch für Consumer-Displays ab. Die automatisierte, bildbasierte Ausrichtung hält die Initialjustage schnell und weitgehend bedienerunabhängig, und das DUT kann frei innerhalb einer rund 300 mm × 300 mm × 300 mm großen Goniobox platziert werden: Prototypen mit nicht-standardisierten Halterungen, gewölbte Panels, Pillar-to-Pillar-Displays und lose montierte Module lassen sich allesamt vermessen — Situationen, die bei einem klassischen System mit festem Drehzentrum üblicherweise eine kundenspezifische DUT-Halterung erfordern.
Eine methodische Gegenüberstellung von Photometric Robotics und klassischen Systemen für die Displaymesstechnik ist auch in unserem peer-reviewed Fachartikel "Goniometric Measurements Using Photometric Robots With Imaging Luminance Measurement Devices (ILMDs)" zu finden.
Ist LMK Position günstiger als ein kundenspezifisches Mehrachs-System?
Ja. Da LMK Position um einen 6-Achs-Industrieroboter als Standardkomponente herum aufgebaut ist, ist das Gesamtsystem in der Regel günstiger als eine kundenspezifisch gefertigte, hochpräzise Mehrachsmechanik für vergleichbare Ausrichtungs- und goniometrische Aufgaben. Industrielle 6-Achs-Arme amortisieren ihre Entwicklung über viele Branchen, während kundenspezifische Messmechaniken im Wesentlichen Einzelfertigungen für genau eine Anwendung sind. Der konkrete Systempreis hängt von der gewählten Kamera, den Objektiven und den Optionen ab; Angebote erfolgen daher projektbezogen.
Zwei weitere Effekte verstärken den Vorteil auf TCO-Ebene: (1) Dieselbe Plattform dient der BlackMURA-Ausrichtung, der Konoskopmessung, dem Image Stitching und goniometrischen Messungen — ein einziges Instrument ersetzt mehrere dedizierte Werkzeuge. Und (2) die Bewegungsfreiheit des Roboters wird von zwei Messgeräten gleichzeitig genutzt: Die LMK erfasst Leuchtdichte und Farbe an jedem Vantage Point, während das specbos-Spektroradiometer parallel an denselben Positionen während eines goniometrischen Scans spektrale Daten liefert.
Ist LMK Position für die Produktion / EOL geeignet — oder nur für F&E?
Über F&E hinaus eignet sich LMK Position gut für End-of-Line- (EOL-)Prüfungen, bei denen Bewegung unvermeidbar ist — etwa wenn mehrere Messpositionen an demselben DUT innerhalb der Taktzeit angefahren werden müssen oder wenn mehrere DUT-Varianten dieselbe EOL-Station bedienen und eine starre mechanische Halterung nicht praktikabel ist. Für sehr hochvolumige EOL-Stationen mit nur einem DUT-Typ und einer einzigen Messgeometrie kann eine dedizierte mechanische Halterung weiterhin wirtschaftlicher sein; die Stärke von LMK Position liegt im mittelvolumigen, variantenreichen Segment sowie bei mehrpositionalen EOL-Aufgaben.
Lässt sich LMK Position programmatisch ansteuern — welche SDK-Sprachen werden unterstützt?
Jedes LMK-Position-System wird mit einer grafischen Bedienoberfläche (GUI) und einer SDK ausgeliefert. Die SDK lässt sich aus allen gängigen Programmiersprachen aufrufen — Python, MATLAB, C++ und LabVIEW. Programmierbeispiele und die SDK-Dokumentation stellen wir auf Anfrage zur Verfügung.
In welchen Regionen kann das System integriert werden — und wie ist die CE-/Sicherheitsdokumentation geregelt?
Die vollständige Vor-Ort-Integration wird in der EU, in Südkorea und in China angeboten — durch TechnoTeam gemeinsam mit regionalen Partnern. Das konfigurierte System erfüllt alle einschlägigen Sicherheitsnormen. Für Installationen in anderen Regionen bitten wir um direkte Kontaktaufnahme mit TechnoTeam, um den passenden Integrationsweg zu besprechen.
Jede EU-Installation wird mit einer projektspezifischen CE-Erklärung und einem vollständigen, auf den tatsächlichen Aufbau, die zusätzlichen Sicherheitseinrichtungen und den vorhandenen Sicherheitsbereich des Kunden zugeschnittenen Dokumentationspaket ausgeliefert — das ist die verbindliche Dokumentation für das gelieferte System. Das herunterladbare Dokument Setup and Safety of LMK Position dient als Überblick für die frühe Planungsphase; die entsprechende regionale Dokumentation für Installationen in Südkorea und China stellen unsere lokalen Partner bereit.
Lässt sich LMK Position auch für Nicht-Display-Messaufgaben einsetzen?
Grundsätzlich ja — mit einer Einschränkung. Die rein geometrischen Stärken der Plattform sind nicht display-spezifisch:
- Wiederholgenaues Anfahren gespeicherter Posen — für jedes Messobjekt, das an mehreren, klar definierten Positionen im Raum geprüft werden muss.
- Goniometrische Scans — die LMK (und optional das specbos) wird durch vordefinierte Blickrichtungen geführt.
Beides funktioniert ebenso gut für Nicht-Display-DUTs (leuchtende Objekte, Bedienpanels, Beleuchtungsmodule usw.).
Die Einschränkung: Mehrere der automatisierten Ausrichtungsroutinen setzen Testmuster voraus, die ein Display naturgemäß selbst erzeugen kann — die BlackMURA-artige Senkrechtausrichtung etwa geht davon aus, dass ein Testmuster auf dem DUT dargestellt werden kann. Für Nicht-Display-DUTs müssen diese Muster extern bereitgestellt werden (gedruckte Targets, ein Array beleuchteter LEDs, ein Hilfsdisplay in der Messebene) — machbar, aber mit zusätzlichem Aufbauaufwand verbunden. Für reines Posen-Anfahren oder goniometrische Datenerfassung ist die Einschränkung gering; für den vollen bildgeführten Ausrichtungs-Workflow an Nicht-Display-Objekten sollte die Testmuster-Bereitstellung vorab besprochen werden. Erste Kundensysteme mit solchen Erweiterungen sind bereits im Einsatz.
RELEVANTE PRODUKTE UND APPLIKATIONEN






Publikationen
Goniometric Measurements Using Photometric Robots With Imaging Luminance Measurement Devices (ILMDs)
Journal of the Society for Information Display
When measuring display-specific parameters such as luminance, contrast, or color, which depend on the viewing angle, precise and reproducible positioning of the measuring system is essential for achieving reliable results. This study examines how photometric robots, which integrate imaging luminance measurement devices (ILMDs) with industrial robotic systems, can be used as goniophotometers for display and illuminated object measurement technology. Physical limitations are discussed, and the position accuracy and repeatability are analyzed. Recent advancements in this field are explored, including enhanced goniophotometric functions, spectroradiometer integration, absolute robot calibration methods, and specialized software innovations.
Advanced Alignment and Metrology Concepts Using Photometric Robotics with Examples for Automotive Displays
International Conference on Display Technology (ICDT 2021)
The alignment quality and reproducibility in ILMD (Imaging Luminance Measurement Device) based display metrology has a great influence on the reproducibility of the obtained measurement data. In this context, this contribution outlines and introduces several advanced measurement and alignment concepts that can be performed with “photometric robotics”. The term describes machine vision performed with an ILMD supported by robotic movements.
Precise Virtual Image Distance Measurements Using Imaging Luminance Measurement Devices with Type II Calibration
SID Vehicle Displays & Interfaces 2022
As head-up displays play an increasingly important role in modern vehicle cockpits, there is a growing demand for measurement procedures to characterize them. There are two general approaches to measuring virtual image distance, a parallax-based triangulation method and a focus-based technique. They can be performed using Imaging Luminance Measurement Devices with type II calibration, making them suitable for photometrical and geometrical measurements. This paper examines the advantages and drawbacks of both methods using mathematical models and measurement data.
Distinguished Paper: Short Distance Uniformity and BlackMURA Measurements
Society for Information Display
The increasing display sizes and changing form factors of displays, including automotive displays, lead to impractical measurement distances for spatial uniformity measurements. This contribution suggests and exemplarily applies two alternative and combinable methods to allow spatial uniformity measurements at low distances and describes an adjusted BlackMURA compliant validation procedure. The proposed methods are validated with a high-quality display device and are compared to results using the standard long-distance measurement procedure.
Photometric Robotics for Fast and Precise Human-Centered Automotive Display Metrology
SID Vehicle Displays & Interfaces 2021
The increasing complexity of automotive displays in terms of design, shape, and degree of integration leads to an increasing complexity of setup and alignment procedures. In this context, the effort required to ensure reproducible measurement results, e.g. for prototypes or in research and development is also increasing rapidly. We introduce the concept of photometric robotics which combines machine vision, photometry, and robotic to solve these challenges.
- Typ:
- Paket
- Anwendungen:
- Automotive Display
- Messgröße:
- Farbmessung Lichtmessung
- Aufgaben:
- Automation & Industrie Entwicklung & Industrie Wissenschaft & Forschung